_1718851653.png)
_1718851630.png)
_1718851608.png)
发送邮件
请访问我们的地点页面,了解离您最近的鑫源宇通的位置。


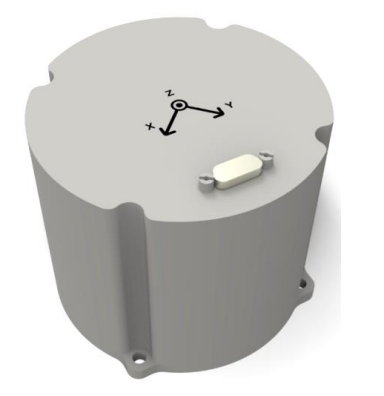
本产品内置高精度三轴一体光纤陀螺、小型石英挠性加速度计及支持自主北斗功能的移动测绘级多模多频 GNSS 接收机。通过先进的智能组合导航算法和卡尔曼滤波,针对 GNSS 遮挡、多路径干扰情况进行优化设计,可实现运动载体高精度的航向、姿态、速度和位置测量。
该惯导系统还具有多种传感器接口,可良好的满足城市峡谷等复杂环境下长时间、高精度、高可靠性导航应用需求,可用于各类无人系统的导航与控制。
快速准确确定初始航向、姿态
支持实时航向、姿态输出
内置 GPS、北斗双模接收机
动态快速对准
INS/GNSS 组合一体化设计
支持 IE 后处理
抗电磁干扰和振动
增强型卡尔曼滤波算法
车载导航
机载导航
舰船导航
稳定控制
主要器件特性 | ||||||||
陀螺 | 量程 | ±500°/s | 加速度计 | 量程 | ≥|±20| g | |||
零偏稳定性 | ≤0.15°/h(10s平滑,全温定温点) | 零偏稳定性(常温) | ≤30 μg | |||||
≤0.02°/h(Allan方差) | ||||||||
物理特性 | 接口特性 | |||||||
供电电压 | 24V DC额定(12~36V DC) | 接口方式 | RS232/RS422/CAN/网口 | |||||
功耗 | <14W | |||||||
工作温度 | -40℃~+70℃ | 传输速率 | 115200bps(可配置) | |||||
储存温度 | -55℃~+85℃ | 数据更新率 | 400Hz | |||||
防护等级 | IP65 | |||||||
物理尺寸 | ≤100mm×100mm×108mm | |||||||
冲击 | 15g,11ms 半正弦波 | |||||||
振动 | 6.06g,20~2000Hz,宽带随机 | |||||||
重量 | ≤1.4Kg | |||||||