

_1679715011.png)
发送邮件
请访问我们的地点页面,了解离您最近的鑫源宇通的位置。


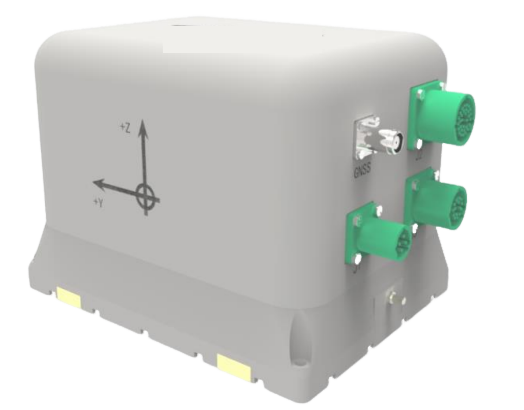
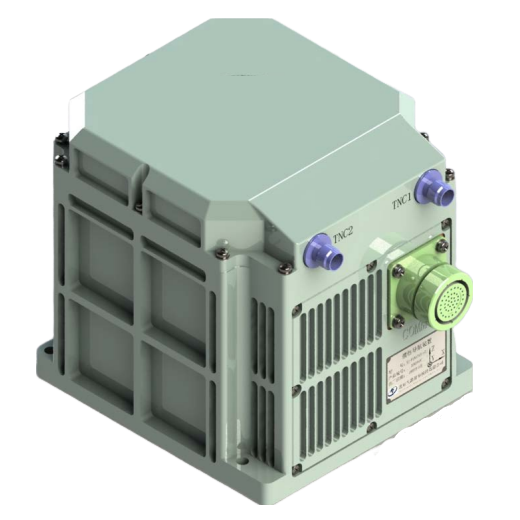
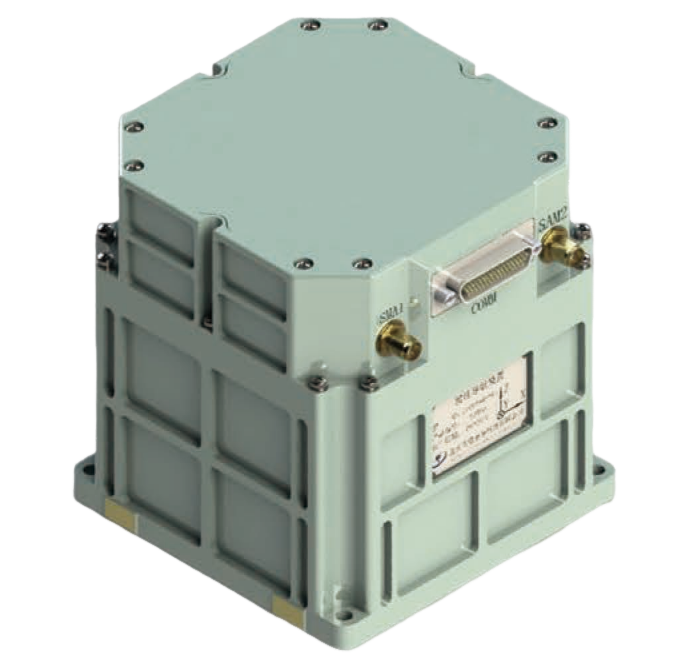
本产品内置高精度三轴一体光纤陀螺、高精度石英挠性加速度计及支持自主北斗功能的移动测绘级多模多频 GNSS 接收机。通过先进的智能组合导航算法和卡尔曼滤波,针对 GNSS 遮挡、多路径干扰情况进行优化设计,可实现运动载体高精度的航向、姿态、速度和位置测量。
该惯导系统还具有 GNSS/里程计/DVL/气压高度计等多种传感器接口,可良好地满足城市峡谷等复杂环境下长时间、高精度、高可靠性导航应用需求,可用于各类无人系统的导航与控制。
快速准确确定初始航向、姿态
支持实时航向、姿态输出
内置 GPS、北斗双模接收机
动态快速对准
INS/GNSS 组合一体化设计
支持 IE 后处理
抗电磁干扰和振动
增强型卡尔曼滤波算法
车载导航
机载导航
舰船导航
稳定控制
| 惯性/卫星组合导航精度 | |||||
| 航向 | 0.05°secφ (RMS, φ 为当地纬度)(静态自寻北,单天线/手动装订初始坐标) 0.1° (RMS)(静态双天线,2m 基线) 0.02° (RMS)(单天线/双天线,载体机动后) | ||||
| 姿态 | 0.01°(RMS) | ||||
| 位置 | 单点定位:水平≤1.5m,高程≤3m(RMS,卫星信号良好); RTK:水平≤1cm+1ppm,高程≤2cm+1ppm(RMS ,载波相位差分链路良好) | ||||
| 速度 | 0.01m/s(RMS, 载体速度小于 500m/s) | ||||
| 对准时间 | ≤5min(静态自寻北) ≤1min(双天线辅助定向) | ||||
| 数据更新率 | 400Hz(可配置) | ||||
| 升沉 | ≤5cm(升沉<1m)或 5%(升沉>1m) | ||||
| 启动时间 | ≤10s | ||||
| 惯性/ODO/DVL 组合 | 0.5%×行驶里程(取决于外接里程计精度) | ||||
| 纯惯性导航精度 | |||||
| 姿态 | 方位保持精度:0.01°/h( RMS );水平姿态保持精度:0.005°/h(RMS) | ||||
| 位置 | 定位精度:≤1n mile/h(50%CEP) | ||||
| 速度 | 水平速度精度:≤1m/s(1σ) | ||||
| 主要器件特性 | |||||
| 陀螺 | 量程 | ±500deg/s | 加速度计 | 量程 | ≥|±30| g |
| 零偏稳定性(常温) | ≤0.01°/h(10s平滑),≤0.004°/h(100s平滑) | 零偏稳定性 | ≤20μg(1σ) | ||
| 零偏重复性 | ≤0.003°/h | 零偏重复性 | |||
| 随机游走系数 | ≤0.0005º/h1/2 | 二阶非线性系数 | ≤|±10|µg/g2 | ||
| 标度因数非线性 | ≤10ppm | 标度因数 | 1.0~1.3mA/g | ||
| 标度因数重复性(常温) | ≤10ppm | 偏值月重复性(1σ) | ≤20μg | ||
| 标度因数月重复性(1σ) | ≤20 ppm | ||||
| 二阶非线性系数月重复性(1σ) | ≤10μg/g2 | ||||
| 偏值温度系数 | ≤|±40|μg/℃ | ||||
| 度因数温度系数 | ≤|±50|ppm/℃ | ||||
| 物理特性 | 接口特性 | ||||
| 供电电压 | 24V DC 额定(12~32V DC) | 通讯接口 | RS422/RS232/CAN/网口 | ||
| 功耗 | <25W | 数据更新率 | 400Hz(可配置) | ||
| 工作温度 | -40℃~+70℃ | 传输速率 | 115200bps(可配置) | ||
| 存贮温度 | -55℃~+85℃ | 用户模式 | |||
| 防护等级 | IP65 | ||||
| 冲击 | 15g,11ms 半正弦波 | ||||
| 震动 | 6.06g,20~2000Hz,带宽随机 | 车载(默认)、机载、船载 | |||
| 物理尺寸 | ≤201mm×156mm×151mm | ||||
| 重量 | ≤6Kg | ||||